![灵活的机器人设计为“成长”就像植物蛇通过紧凑的空间,升降负荷[视频]](http://www.jjchem.net/uploadfile/2021/0616/2021570709.jpg)

![快速作用的弹性能量机器人灵感来自变色龙的舌头[视频]](http://www.jjchem.net/uploadfile/2021/0616/2021566192.jpg)
![工程师用AI大脑创造智能机器人狗[视频]](http://www.jjchem.net/uploadfile/2021/0616/2021550559.jpg)



所有平台仅提供服务对接功能,所载文章、数据仅供参考,股市有风险,投资需谨慎,用户需独立做出投资决策,风险自担!

时间:2022-01-02 08:58:03来源:

对于最后一英里的交付,未来的机器人可以使用新的麻省理工学院算法找到前门,在其环境中使用线索。
在不太遥远的未来,机器人可以被派遣作为最后一英里的送货车,以便在您的门口丢弃您的外出订单,包装或餐具套装订阅 - 如果他们能找到门。
机器人导航的标准方法涉及提前映射区域,然后使用算法将机器人指向地图上的特定目标或GPS坐标。虽然这种方法可能对探索特定环境有意义,例如特定建筑物或计划障碍课程的布局,但它可以在最后一英里的交付的背景下变得笨拙。
例如,想象一下,必须在机器人的交付区域内预先映射每个单个邻居,包括该邻域内的每个房屋的配置以及每个房屋的前门的特定坐标。这样的任务可能难以扩展到整个城市,特别是随着房屋的外部经常随季节而变化。每个房屋映射也可以遇到安全和隐私问题。
现在麻省理工学院工程师开发了一种导航方法,不需要提前映射区域。相反,它们的方法使机器人能够在其环境中使用线索来规划到其目的地的路线,这可以通过普通语义术语(例如“前门”或“车库”)来描述,而不是在地图上作为坐标。例如,如果指示机器人将包裹交付给某人的前门,它可能会在道路上开始并看到一个车道,它已经训练了,以识别它识别它的可能导致人行道,这反过来可能导致它到前门。
新技术可以大大减少机器人花费在识别其目标之前探索房产的时间,并且它不依赖于特定住所的地图。
“我们不想制作我们需要访问的每个建筑地图,”麻省理工学院机械工程系的研究生Michael Everett说。“通过这种技术,我们希望在任何车道结束时放下一个机器人,并找到一个门。”
埃弗雷特本周将在智能机器人和系统的国际会议上展示本集团的结果。该论文由Jonathan,MIT的航空和航天教授和福特汽车公司Justin Miller的撰写,是“认知机器人最佳纸张”的决赛选项。
近年来,研究人员已经介绍了自然,语言语言到机器人系统,培训机器人通过他们的语义标签识别对象,因此他们可以在视觉上处理门作为门,而且不仅仅是坚实的矩形障碍物。
“现在,我们有能力在埃弗里特说,这是一个有意义的东西的感觉。
埃弗雷特,如何以及米勒使用类似的语义技术作为新的导航方法的跳板,它利用预先存在的算法从可视数据中提取特征来生成相同场景的新映射,表示为语义线索或上下文。
在他们的情况下,研究人员使用算法使用每个对象的语义标签和深度图像来构建环境的地图。该算法称为语义SLAM(同时定位和映射)。
虽然其他语义算法使机器人能够识别和映射到他们的环境中的对象,但它们在导航新环境时尚未允许机器人在导航新环境中进行决策如“前门”。
“之前,探索只是,倾向于一个机器人,并说'去',它将四处走动并最终到达那里,但它会很慢,”怎么说。
研究人员希望通过语义,上下文的世界加快机器人的路径规划。它们开发了一种新的“成本转到估算器”,这是一种算法,该算法将通过预先存在的SLAM算法预先存在于第二地图创建的语义地图,表示任何给定位置接近目标的可能性。
“这是由图像到图像翻译的启发,在那里你拍了一张猫的照片,让它看起来像一只狗,”埃弗里特说。“同样类型的想法发生在这里,在这里拍摄一个看起来像世界地图的图像,并将其转化为看起来像世界地图的其他形象,但现在基于地图的不同点的近似点是有色的。是最终目标。“
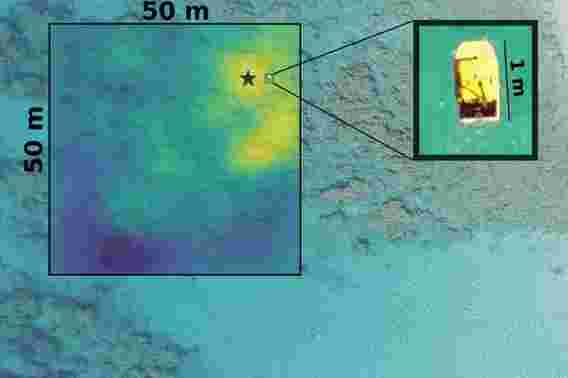
这种成本的成本映射以灰度为主,以较深的地区代表到远离目标的位置,以及较轻区域作为接近目标的区域。例如,在语义地图中以黄色编码的人行道,可以通过成本转到算法作为新地图中的较暗区域进行翻译,与车道相比,这在接近前门时逐渐打火 - 新地图中最轻的区域。
研究人员在冰地图上培训了这种新的卫星图像算法,其中来自一个城市和三个郊区邻居的77个房屋。该系统将语义映射转换为成本到达地图,并在地图中较浅的区域映射到最终目标。对于每个卫星图像,埃弗莱特将语义标签和颜色分配给典型的前院中的上下文特征,例如前门的灰色,用于车道的蓝色,以及绿色的对冲。
在此培训过程中,该团队还将掩码应用于每个图像以模仿机器人的相机可能会像码的局部相机一样。
“我们方法的一部分是[给出系统]许多部分图像,”如何解释。“所以它真的不得不pu出所有这些东西是相互关联的。这是让这项工作变得稳健的一部分。“
然后研究人员在训练数据集之外的全新房屋的图像模拟中测试了他们的方法,首先使用预先存在的SLAM算法来生成语义地图,然后将其新的成本转到估算器应用于生成第二个地图和目标的路径,在这种情况下,前门。
本集团的新成本技术发现前门比经典导航算法快于古典导航算法,这些算法不会考虑上下文或语义,而是花费过多的步骤探索不太可能靠近其目标的区域。
埃弗雷特说结果说明了机器人如何使用上下文来有效地定位目标,即使在不熟悉的未映射的环境中。
“即使一个机器人正在向环境传递一个包,它从未去过,可能会有线索与它所见的其他地方相同,”埃弗雷特说。“所以世界可能会略有不同,但可能有一些共同点。”
该研究部分由福特汽车公司提供支持。
声明:文章仅代表原作者观点,不代表本站立场;如有侵权、违规,可直接反馈本站,我们将会作修改或删除处理。





图文推荐
![来自麻省理工学院的创新AI帮助送货机器人找到前门[视频]](http://www.jjchem.net/uploadfile/2021/0616/2021559821.jpg)
2022-01-02 08:58:03

2022-01-01 19:58:00

2022-01-01 18:58:00
2022-01-01 17:58:00
2022-01-01 16:58:00

2022-01-01 15:58:00
热点排行
精彩文章
![美国宇航局的恐怖银河系[视频]](http://www.jjchem.net/uploadfile/2021/0616/2021559569.jpg)
2022-01-01 19:58:02

2022-01-01 18:58:02
2022-01-01 17:58:02

2022-01-01 16:58:01
2022-01-01 15:58:02

2022-01-01 14:58:02
热门推荐
