





所有平台仅提供服务对接功能,所载文章、数据仅供参考,股市有风险,投资需谨慎,用户需独立做出投资决策,风险自担!

时间:2021-11-14 16:58:07来源:
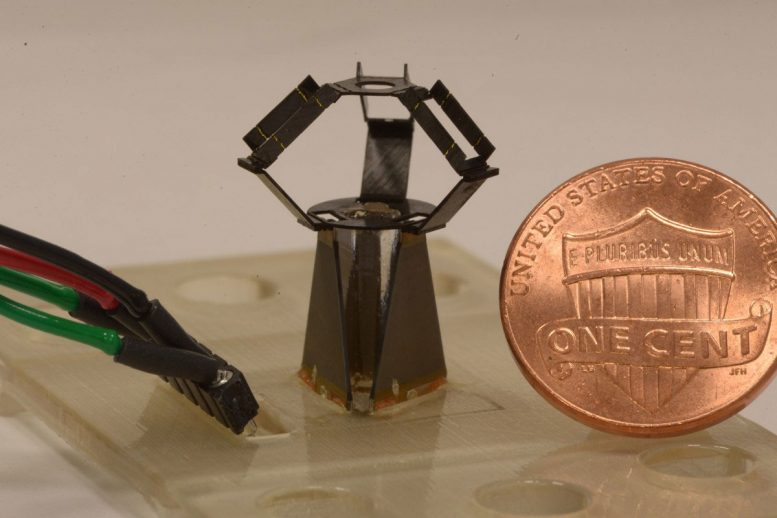
完全展开,Millidelta大致比较了一件,并且可以在比其他目前可用的Delta机器人的频率下执行15到20倍的运动。
由于其高精度和速度,Delta机器人在许多工业过程中部署,包括拾取组件,加工,焊接和食品包装。从第一个版本的Reymond Clavel开发为巧克力工厂迅速将巧克力果仁糖放在他们的包装中,Delta机器人使用三个丝身控制和轻质的臂,指导平台在三个方向上快速准确地移动。该平台用作阶段,类似于飞行模拟器中使用的阶段,或者耦合到操作装置,其可以例如掌握,移动和释放规定的模式。随着时间的推移,机器人设计了有限的工作区中的任务的较小和较小的Delta机器人,但进一步缩小到毫米刻度与传统的制造技术,并且组件已被证明是无果腐的。
在科学机器人中报告,由罗伯特伍德团队在哈佛大学的生物学启发工程研究所和约翰A.保尔森工程和应用科学学院(SEAR)开发的Millidelta机器人新设计,克雷特伍德队(John A.Paulson学院(SEAR)克服了这个小型化挑战。通过将它们的微制造技术与能够包含弯曲接头和弯曲致动器的高性能复合材料,Millidelta可以高速,力和千分尺精度运行,它们一起使其与制造和药物中的一系列微操纵任务相兼容。
2011年,由弹出书籍和折纸的启发,Wood的团队开发了一种微制造方法,使机器人组装从复合材料的平板上。弹出MEMS(微机电系统的短路)制造已经使用,自那时被使用,以建立可以简单地走开的动态厘米级机器,或者,如罗伯比亚的那样,飞行。在他们的新研究中,研究人员应用了他们的方法来开发一个达到20毫米的三倍机器人的方法。
“缩放的物理告诉我们,降低了Delta机器人的大小将增加他们的速度和加速,并弹出MEMS制造,其能够使用任何材料或材料组合,似乎是攻击这个问题的理想方式, “伍德,谁是智商研究所和生物透露机器人平台的联合领导者,以及海洋的工程和应用科学教授的核心教师。“这种方法还允许我们迅速通过一些导致我们到最后的Millidelta的迭代。”
此视频简要介绍了Millidelta机器人是如何构建的以及它的工作原理。
Millidelta设计采用复合层压结构,具有嵌入式弯曲接头,近似大型Delta机器人中的更复杂的关节。“借助组装夹具,这种层压板可以精确地折叠成毫米级达达机器人。Millidelta还利用压电执行器,该致动器允许它在频率上执行比其他目前可用的三角机器人高的频率的运动,“Wyss Institute员工研究人员在Wood的团队中的Wyss Institute员工研究人员上第一个作者Hayley McClintock说。
此外,该团队证明,Millidelta可以在大约7个立方米的工作空间中运行,并且它可以施加力量和表现出轨迹,以及其高频可以使其成为工业挑选过程中的微操纵的理想选择和微观手术等视网膜显微疗养学人员对人眼进行。
研究人员将Millidelta对微型咨询和其他微小操纵进行微调和其他微手段的潜力,作为手势取消设备的机器人。“我们首先将牙签的尖端覆盖,当通过辛勤化,计算那些,并将它们送入能够匹配和取消将它们的人联系在一起时,将其送入Millidelta机器人,”Fatma Zeynep Temel()在木队的博士后研究员。研究人员认为专业的Millidelta机器人可以被添加到现有的机器人设备上,或者作为独立设备开发,例如用于操纵研究和临床实验室中细胞的平台。
出版物:Hayley McClintock等,等,“Millidelta:高带宽,高精度,毫米级三角洲机器人,“科学机器人2018年1月17日:卷。 3,问题14,eaar3018; DOI:10.1126 / scirobotics.aar3018
声明:文章仅代表原作者观点,不代表本站立场;如有侵权、违规,可直接反馈本站,我们将会作修改或删除处理。





图文推荐

2021-11-14 16:58:02
2021-11-14 15:58:03
2021-11-14 14:58:02

2021-11-14 13:58:02

2021-11-14 12:58:03

2021-11-14 11:58:02
热点排行
精彩文章
2021-11-14 16:58:04

2021-11-14 15:58:05

2021-11-14 14:58:04
2021-11-14 13:58:04
2021-11-14 12:58:05
2021-11-14 11:58:04
热门推荐
