







所有平台仅提供服务对接功能,所载文章、数据仅供参考,股市有风险,投资需谨慎,用户需独立做出投资决策,风险自担!

时间:2022-01-03 16:58:07来源:
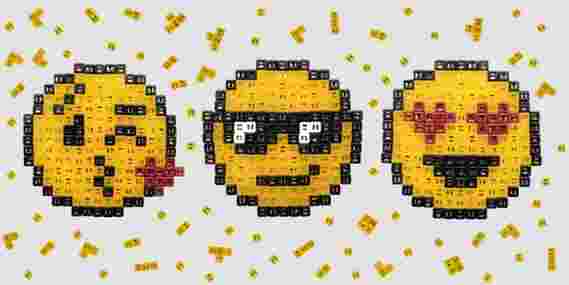
Quadrupole模块可以组装成二维形状,包括像素的像素艺术emojis。
Eth科学家们已经开发了可以组装成二维形状并由外部磁场控制的立方体磁性构造块。它们可用于软机器人应用。
如果您曾经尝试过几个真正的强大,小立方体磁铁,则在磁性板上彼此相邻,您会知道您无法做到。遇到的是,磁铁总是在从磁光板垂直伸出的柱中安排自己。此外,几乎不可能将多行这些磁体加入到形成平坦的表面上。那是因为磁铁是双极。相同的杆子互相排斥,一个磁铁的北极始终将自身连接到另一个南极,反之亦然。这解释了为什么它们形成一列与所有磁铁相同的磁体。
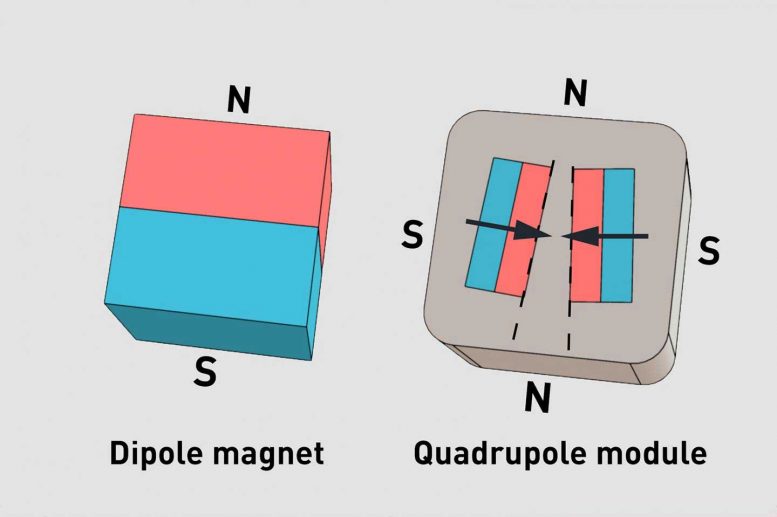
偶极磁铁和四极杆模块以图表形式。
现在,Eth苏黎世的科学家们设法在立方体的形状中创造了磁性建筑块 - 这是第一次 - 可以联合在一起以形成二维形状。科学家呼叫模块的新建筑块不是偶极物,而是四极石,这意味着它们每个都有两个北极和两个南极。在每个模块中,它们是塑料的3D印刷,有两个小型偶像磁铁,其平等杆彼此面对(见图)。构建块可以像小棋盘一样组装,以形成任何二维形状。它的工作方式:因为南极和北极互相吸引,一个四边形的建筑块,其两个南极面向左右左右都会吸引,在其四个侧面,一个旋转90度的建筑块,所以它的北极在左边的北极正确的。

四极模块的边缘长度超过两毫米
在这一原则上建立,科学家制造了彩色模块,边缘长度超过两毫米。它们将它们组装成像素艺术Emojis,以演示模块可以做些什么。但是,可能使用案例超出了这样的噱头。“我们对软机器人领域的应用特别感兴趣,”博士教授尼尔森群体的博士生·罗兰·纳尔逊群体的博士生,罗兰德·埃尔森(Eth)的博士学位们说,该论文中的科学家们在科学家在科学机器人中发表。
Quadrupole主导了模块的磁性。它比这更复杂,但是,因为除了强大的四极杆外,科学家还建立了一个弱偶极子进入积木。它们通过将模块中的小磁体以彼此的轻微角度而不是并行(见图)来实现这一点。
“这使得模块与外部磁场同时对齐,如指南针,”GU解释。“通过可变磁场,我们可以移动我们从模块中构建的形状。添加一些柔性连接器,甚至可以构建可由磁场控制的机器人。“
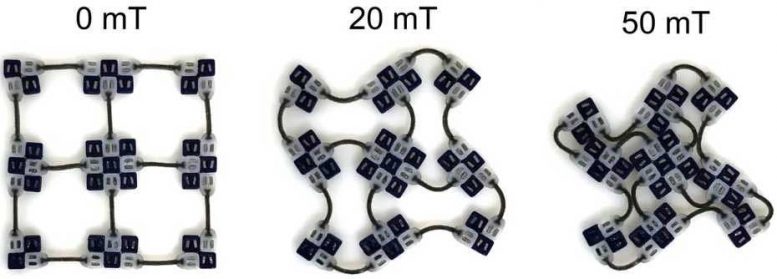
外部磁场(中心和右图像)可用于控制模块的方向。这里显示的是磁模块和柔性连接器的组合。
顾说他们的工作最初是为了发展新的原则。他说,它是独立的,这意味着没有理由无法开发多大的四极模块。科学家们还在研究模块如何使用如何在磁场的帮助下将线性结构与多维物体组合到多维物体中。这是未来在药物中可以使用的东西:可以想到,诸如支架的物体可以由由这种模块组成的螺纹形成。通过微小的开口将螺纹插入到相对简单,微创过程中,然后施加的磁场将其组装成主体内的最终多维结构。
参考:“具有任意形状和磁化的磁性四极组件”由Hongri Gu,Quentin Boehler,Daniel Ahmed And Bradley J. Nelson,2019年10月30日,科学机器人.DOI:
10.1126 / scirobotics.aax8977.
声明:文章仅代表原作者观点,不代表本站立场;如有侵权、违规,可直接反馈本站,我们将会作修改或删除处理。







图文推荐
2022-01-03 16:58:04
2022-01-03 15:58:03
2022-01-03 14:58:00
2022-01-03 13:58:00

2022-01-03 12:58:00

2022-01-03 11:58:00
热点排行
精彩文章
2022-01-03 16:58:06
![印度的Vikram着陆器崩溃网站在月球上发现了[图片]](http://www.jjchem.net/uploadfile/2021/0616/2021562702.jpg)
2022-01-03 15:58:04

2022-01-03 14:58:02

2022-01-03 13:58:02

2022-01-03 12:58:01

2022-01-03 11:58:02
热门推荐
